第 7 章 特征检测与匹配 (Feature Detection and Matching)
核心结论
-
特征点(§7.1):兴趣点是图像中"特别"的点(角点 / blob / 鞍点);SIFT / SURF / ORB 是经典算法;现代用深度学习(SuperPoint / LoFTR)。
-
边缘与轮廓(§7.2):Canny 边缘检测;主动轮廓(snake);边缘跟踪。
-
直线与消失点(§7.4):Hough 变换检测直线;消失点估算相机方向;3D 重建的基础。
-
分割(§7.5):基于特征 / 区域的分割;mean-shift / graph cut / GrabCut。
-
特征匹配(§7.1.4):SIFT / ORB 描述子 + 最近邻匹配 + RANSAC 去外点;图像拼接 / 3D 重建的基础。
|
本章主旨
本章是"特征章"——从图像提取稳定的局部特征(点 / 边 / 线 / 区域),用于匹配 / 对齐 / 重建。理解 SIFT / ORB 才能做图像拼接 / 相机标定 / SLAM 等任务。 |
一、核心概念
本章围绕 5 个核心概念展开:特征点 → 边缘 → 轮廓 → 直线 / 消失点 → 分割。
| 概念 | 定义 + 重要性 | 实现提示 |
|---|---|---|
特征点 (interest points) |
角点 / blob / 鞍点;SIFT / SURF / ORB;现代深度学习(SuperPoint)。 |
§7.1;图像匹配 / 拼接 / SLAM 的基础。 |
特征描述子 |
关键点周围的局部描述;SIFT 128 维 / ORB 32 字节。 |
§7.1.4;匹配的核心。 |
边缘与轮廓 |
Canny 边缘检测;主动轮廓(snake);边界跟踪。 |
§7.2;图像分割的前处理。 |
直线与消失点 |
Hough 变换;消失点估算相机方向。 |
§7.4;3D 重建 / 自动驾驶车道线检测。 |
分割 |
区域 / 边界分割;mean-shift / graph cut / GrabCut。 |
§7.5;图像分割的经典方法。 |
二、详细笔记
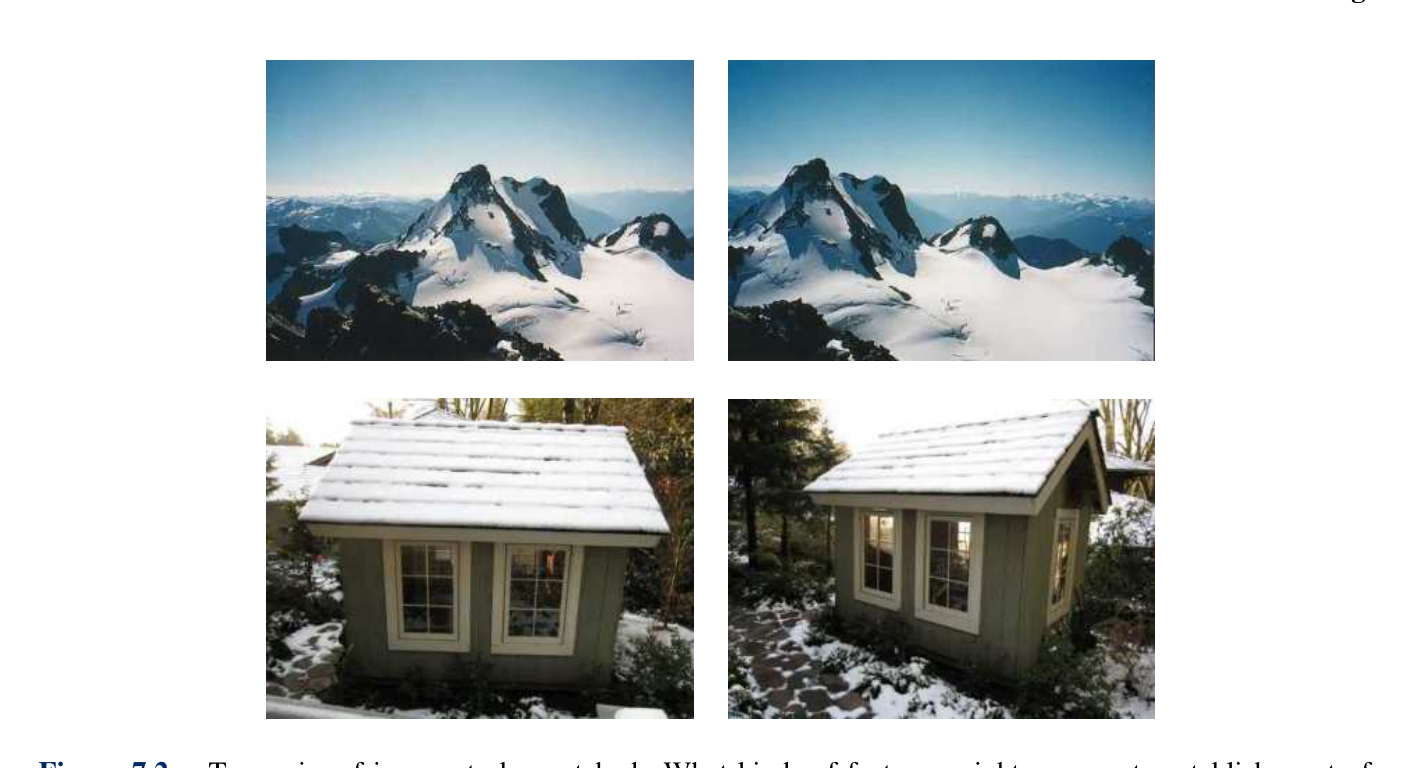
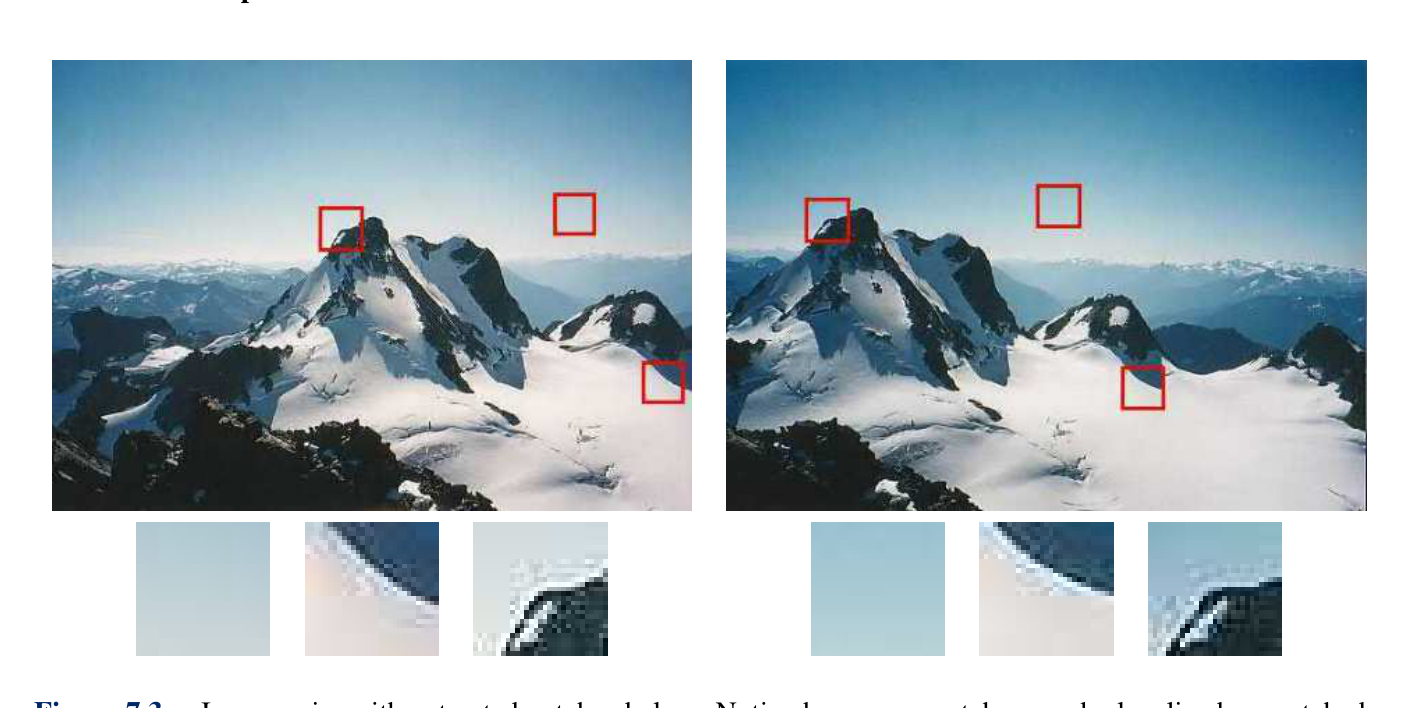
2.1 特征点检测 (Interest Point Detection)
What:在图像中检测"特别"的点(角点 / blob)——这些点在视角 / 光照变化下稳定。
Why:图像匹配 / 拼接 / 3D 重建 / SLAM 的基础;特征点 = 图像的"骨架"。
How:
经典算法(§7.1):
-
Harris 角点:自相关矩阵特征值;角点 = 两个特征值都大。
-
SIFT(2004):DoG 金字塔 + 极值点检测;尺度不变。
-
SURF(2006):Hessian 矩阵 + 积分图;比 SIFT 快。
-
ORB(2011):FAST 角点 + BRIEF 描述子;二值描述子,快速。
-
现代深度学习:SuperPoint / LoFTR / DISK——更鲁棒但需 GPU。
|
特征点的"理想性质"
|
When:图像匹配 / 拼接;SLAM / VO;3D 重建;视觉定位。
Example:cv2.SIFT_create();cv2.ORB_create(5000);cv2.goodFeaturesToTrack(Harris)。
2.2 特征描述子 (Feature Descriptors)
What:关键点周围的局部描述子——把关键点表示为可比较的向量 / 二进制串。
Why:特征匹配的核心;描述子决定匹配的鲁棒性。
How:
描述子类型(§7.1.4):
-
SIFT:128 维浮点向量;梯度直方图;尺度 / 旋转不变。
-
SURF:64 维;Hessian 响应;比 SIFT 快。
-
ORB:256 bit(二值);BRIEF 描述子;极快。
-
深度学习描述子:SuperPoint(半稠密关键点 + 描述子);LoFTR(无检测器,端到端匹配)。
|
描述子的工程权衡
|
When:特征匹配;图像检索;视觉定位。
Example:sift.compute(img, keypoints);orb.detectAndCompute(img, None)。
2.3 特征匹配 (Feature Matching)
What:在不同图像的特征描述子之间找对应关系。
Why:图像拼接 / 3D 重建 / 视觉定位的基础。
How:
匹配流程(§7.1.4):
-
特征检测 + 描述:两图都用 SIFT / ORB。
-
最近邻匹配:描述子 A 找描述子 B 的最近邻。
-
比率测试:Lowe ratio(最近邻 / 次近邻 < 0.8)。
-
RANSAC 去外点(§4.4):用基础 / 单应矩阵一致集验证。
|
匹配算法的工程经验
|
When:图像拼接(OpenCV Stitcher);SLAM(ORB-SLAM);3D 重建。
Example:cv2.BFMatcher(cv2.NORM_L2) + cv2.match(query, train);cv2.findHomography(pts1, pts2, cv2.RANSAC)。
2.4 边缘与轮廓 (Edges & Contours)
What:检测图像中亮度剧烈变化的像素(边缘);跟踪边缘形成轮廓。
Why:图像分割 / 物体识别 / 文档分析的前处理。
How:
边缘检测(§7.2):
-
Sobel / Prewitt / Roberts:一阶导数;简单但对噪声敏感。
-
Laplacian:二阶导数;过零点 = 边缘。
-
Canny(1986):高斯平滑 + 梯度 + 非极大值抑制 + 双阈值 + 边缘跟踪;Canny SOTA。
轮廓(§7.2-§7.3):
-
主动轮廓(snake):能量最小化(图像力 + 内部力)。
-
动态轮廓:snake 的变种;更快收敛。
|
Canny 边缘检测的 5 步
|
When:图像分割预处理;Canny 边缘;文档扫描;车道线检测。
Example:cv2.Canny(img, 50, 150);cv2.findContours;skimage.feature.canny。
2.5 直线与消失点 (Lines & Vanishing Points)
What:Hough 变换检测直线;消失点估算相机方向。
Why:车道线检测 / 3D 重建 / 相机标定的基础。
How:
Hough 变换(§7.4):
-
图像空间的点 → 参数空间的曲线。
-
多条曲线在参数空间交于一点 = 图像中的直线。
消失点:
-
平行直线在图像中交于消失点。
-
消失点位置 = 相机方向。
-
估算相机姿态 / 内参 / 3D 结构。
|
Hough 变换的工程权衡
|
When:车道线检测;消失点估算;表格 / 文档线检测;建筑 3D 重建。
Example:cv2.HoughLines(edges, 1, np.pi/180, 200);cv2.HoughLinesP(edges, 1, np.pi/180, 100, minLineLength, maxLineGap)。
2.6 分割 (Segmentation)
What:把图像分成有意义的区域——基于特征 / 边界 / 区域。
Why:图像理解的基础;目标识别 / 场景分析的前处理。
How:
经典分割方法(§7.5):
-
mean-shift:基于颜色 / 纹理聚类;不需要指定类别数。
-
graph cut / GrabCut:图论最小割;交互式前景提取。
-
分水岭(watershed):拓扑学方法;分离粘连目标。
-
SLIC(Simple Linear Iterative Clustering):超像素;加速后续处理。
|
经典分割 vs 深度学习分割
|
When:经典方法用于交互式分割(GrabCut);深度学习用于语义 / 实例分割。
Example:cv2.grabCut;skimage.segmentation.slic;cv2.watershed。
三、关键图表
视觉图表


四、思维导图
mindmap
root((第 7 章 特征检测与匹配))
特征点
Harris
SIFTSURF
ORB
深度学习
描述子
SIFT128
ORB256bit
SuperPoint
匹配
最近邻
Lowe ratio
RANSAC
边缘轮廓
Canny
主动轮廓
直线消失点
Hough变换
消失点
分割
mean-shift
GrabCut
分水岭五、重点与易错点
-
SIFT 是特征点的里程碑:尺度 / 旋转不变性;现代深度学习描述子(SuperPoint / LoFTR)更强但需 GPU。
-
Lowe ratio 测试:消除 50%+ 误匹配;不测试会得到大量外点。
-
RANSAC 是必须的:含 30%+ 误匹配仍能拟合;现代 GMS / MAGSAC++ 更快。
-
Canny 边缘的阈值:高 / 低阈值需根据图像调整;cv2 自动 + 手动微调。
-
Hough 变换参数空间大:用
HoughLinesP(概率版)只返回线段。 -
消失点估算相机方向:3 个消失点可解算相机内外参;用于自动驾驶 / AR。
-
经典分割快但精度低:深度学习分割(U-Net / SAM)更准但需训练数据。
-
跨章衔接:第 4 章 RANSAC 是匹配的关键;第 8 章对齐 / 拼接用本章特征;第 11 章 SLAM 用 ORB / SuperPoint。